|
Multiple AI Coordination Control that Realizes Efficient Warehouse Picking by Integrating Control of Robotic Arms with AGV
Reduced operation time by 38% through coordinated continuous operation
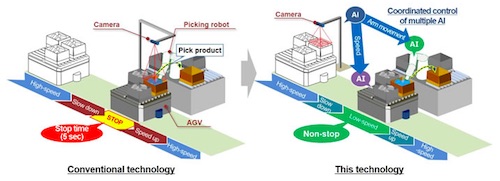
TOKYO, May 28, 2018 - (JCN Newswire) - Hitachi, Ltd. (TSE: 6501) today announced the development of multiple AI coordination control technology that increases the efficiency of the picking process by integrating the control of the picking robot(1) and automated guided vehicle (AGV)(2) to smoothly pick-up specific products from goods carried by the AGV. The new technology coordinates control by integrated management of the AIs that control the picking robot and the AGV, based on decisions made by the AI that determines the optimal picking method for specified products from camera(3) images. The AGV and robot arm can move closer to each other at optimal speeds to avoid collision based on the state of the goods stacked on the AGV, enabling smooth picking by the robot arm without stopping the AGV (Figure 1). The results of a comparative experiment using conventional technology where the AGV is stopped each time for picking, confirmed that the time required for picking could be reduced by 38% with the new technology. Hitachi will work towards the commercialization of a robot system for warehouse operations as well as contribute to increased efficiency in logistics through development of technology to increase the speed and automation of processes. The design of the trajectory planning and fine adjustment function for the robotic arm, necessary for this technology, was developed in collaboration with the University of Edinburgh, U.K.
 | | Figure 1. Comparison of technology to remove products from an AGV using a picking robot. | | |
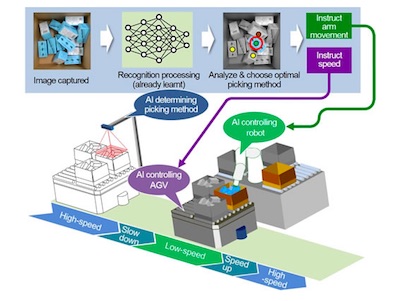 | | Figure 2. Image of real time processing with multiple AI coordination control technology. | | |
http://www.acnnewswire.com/topimg/Low_HitachiAI518Fig1.jpg
Figure 1. Comparison of technology to remove products from an AGV using a picking robot.
In recent years, greater efficiency and automation in warehouse operations are in demand as they face a dramatic increase in picking operations that require specific orders to be selected from a vast range and large number of stock. AGV that carry products by case or by shelf have already been commercialized to support picking operations, and currently development of systems which combine the operation of AGV and picking robots that remove products from cases, is underway. The challenge however is that it is difficult to instantaneously determine the best way to pick up a specific product and control the picking robot while taking into consideration the speed of the AGV as goods in the cart become disarrayed during picking and transport. Thus, it was necessary to stop the AGV before starting picking operations resulting in a time loss while the AGV is stopped which added to the difficulty of establishing more efficient systems. To address this challenge, Hitachi developed the multiple AI coordination control technology to optimize the efficiency of the picking process by coordinating the picking robot and the AGV.
Features of the technology are as follows:
(1) AI determining the optimal picking method from camera images
AI was developed that determines from camera images, the position of a product which can be picked by a picking robot from how goods are stacked in a case and the speed of the AGV. By inputting 3D data of product to be picked before the operation, the AI simulates several tens of thousands of ways that the robotic arm could pick a product from randomly generated various states of stacked goods transported at various speeds. Based on the results of the simulation, the AI automatically generates image processing analysis training data(4) for deep learning(5) to analyze the information necessary to determine how to control the picking robot and the AGV, that is, determine the position of products which change with the state of how goods are stacked as well as the adjustment required in AGV speed. This system can be implemented and operated efficiently as the AI is not required to learn during the actual picking operation, it can be implemented and operated efficiently.
(2) Real-time multiple AI coordination control
Technology was developed to coordinate and control in real-time the AI for the robotic arm as well as the AI for the AGV, based on the AI that determines the optimal picking method from images of goods within cases taken as the AGV approaches the picking robot. This technology instructs the arm movement calculated from the position of the product to be picked to the AI that controls the picking robot, and instructs the AI controlling the AGV to accelerate or decelerate based on current speed. Further, the AI for the picking robot can confirm the speed and the location of the AGV in real time and conducts minor adjustments to prevent the arm from colliding with the case or other products, thus enabling efficient automatic picking as the AGV does not need to be stopped. (Figure 2)
http://www.acnnewswire.com/topimg/Low_HitachiAI518Fig2.jpg
Figure 2. Image of real time processing with multiple AI coordination control technology.
An in-house experiment utilizing this technology resulted in successful picking from AGV which moved non-stop at a speed of 0.5 meters per second. Further, it was found that by employing the new technology, the procedure which required 13 seconds with the conventional method of stopping the AGV to pick products, could be achieved in 8 seconds, a 38% improvement in speed.
Comment from Professor Sethu Vijayakumar FRSE, Personal Chair of Robotics at Edinburgh University and Director of the Edinburgh Centre for Robotics
"We are delighted to see the successful results of more than two years of collaboration with the Hitachi R&D Group, Center for Technology Innovation, culminating in practical and deployable improvements in automated warehousing technology. Our robotics lab has been at the forefront of machine learning techniques for adaptive motion planning and control of complex multi-DOF robots and this provides an excellent opportunity to see this expertise used to solve real world problems."
Hitachi will continue efforts to contribute increasing logistic efficiency by working towards the commercialization of this technology as well as integrating it into its AGV, Racrew(6) and autonomous moving robot, HiMoveRO(7), among others.
(1) Picking is the operation of gathering goods and products according to electronic data and instructions such as at distribution warehouses and manufacturing plants, etc.
(2) An automated or automatic guided vehicles (AGV) transports boxes and shelves containing products to specified locations.
(3) A camera which can photograph RGB-D images as each pixel has both information on color (RGB) and distance (depth).
(4) Training data is used to teach machines to output appropriate answers to input data.
(5) Deep learning is a type of machine learning that mimics mechanisms of the brain's neural circuit. It is comprised of three elements: the input layer, hidden layers, and the output layer. By increasing the number of hidden layers, deep learning is capable of expressing complex models relative to conventional machine learning, and has displayed a high recognition rate in fields such as speech recognition, image recognition, etc.
(6) Racrew is a registered trademark of Hitachi, Ltd. in Japan.
(7) HiMoveRO is a registered trademark and product of Hitachi Plant Mechanics Co., Ltd. in Japan. (in Japanese)
Contact:Hitachi Ltd
Corporate Communications
Tel: +81-3-3258-1111
Source: Hitachi, Ltd.
Sectors: Electronics, Cloud & Enterprise
Copyright ©2024 JCN Newswire. All rights reserved. A division of Japan Corporate News Network. |
Latest Press Release

First-ever Mazda CX-80 Crossover SUV Unveiled in Europe
Apr 19, 2024 13:50 JST
| 
Fujitsu develops technology to convert corporate digital identity credentials, enabling participation of non-European companies in European data spaces
Apr 19, 2024 10:17 JST
| 
Mitsubishi Heavy Industries and NGK to Jointly Develop Hydrogen Purification System from Ammonia Cracking Gas
Apr 18, 2024 17:01 JST
| 
Toyota Launches All-New Land Cruiser "250" Series in Japan
Apr 18, 2024 13:39 JST
|
Fujitsu and Oracle collaborate to deliver sovereign cloud and AI capabilities in Japan
Apr 18, 2024 11:14 JST
| 
Eisai: Research on Treatments for Alzheimer's Disease Based on Its Pathological Mechanisms Recieves Award for Science and Technology (Research Category)
Apr 18, 2024 10:53 JST
| 
All-New Triton Confirmed as First Double-Cab Pickup Truck to Achieve 2024 Five-Star ANCAP Safety Rating
Apr 18, 2024 09:22 JST
|
Eisai's Antiepileptic Drug Fycompa Injection Formulation Launched In Japan
Apr 17, 2024 16:17 JST
| 
Honda Unveils Next-generation EV Series for China
Apr 17, 2024 12:15 JST
| 
Lexus presents Time at the 2024 Milan Design Week
Apr 16, 2024 18:49 JST
| 
Mitsubishi Corporation Announces Participation in a DAC Project in Louisiana, USA
Apr 16, 2024 14:36 JST
|
New circuit challenge for TOYOTA GAZOO Racing
Apr 15, 2024 17:21 JST
|
TOYOTA GAZOO Racing back on asphalt for Croatian challenge
Apr 12, 2024 19:36 JST
|
Heidelberg Materials North America Announces Latest Milestone in Edmonton CCUS Project
Apr 12, 2024 14:39 JST
|
MHIAEL Completes Expansion of the its Nagasaki Plant for Manufacture of Aero Engine Combustors
Apr 11, 2024 18:08 JST
|
Mitsubishi Shipbuilding Acquires Approval in Principle (AiP) from Classification Society ClassNK for Ammonia Fuel Supply System (AFSS)
Apr 11, 2024 17:50 JST
|
DOCOMO, NTT, NEC and Fujitsu Develop Top-level Sub-terahertz 6G Device Capable of Ultra-high-speed 100 Gbps Transmission
Apr 11, 2024 15:10 JST
|
Mitsubishi Corporation Announces Completion of Capital Raise by Nexamp
Apr 11, 2024 13:07 JST
|
Mitsubishi Shipbuilding Receives Order for Ammonia Fuel Supply System for Ammonia-Powered Marine Engine
Apr 10, 2024 16:55 JST
| 
Transgene and NEC Present First Clinical Benefits of Neoantigen Cancer Vaccine, TG4050, in Head & Neck Cancer at AACR 2024
Apr 10, 2024 13:36 JST
|
More Latest Release >>
|